Current representation learning paradigms force a fundamental compromise: self-supervised methods scale to massive datasets but yield opaque features, whereas interpretable models remain bottlenecked by the need for dense human annotation.
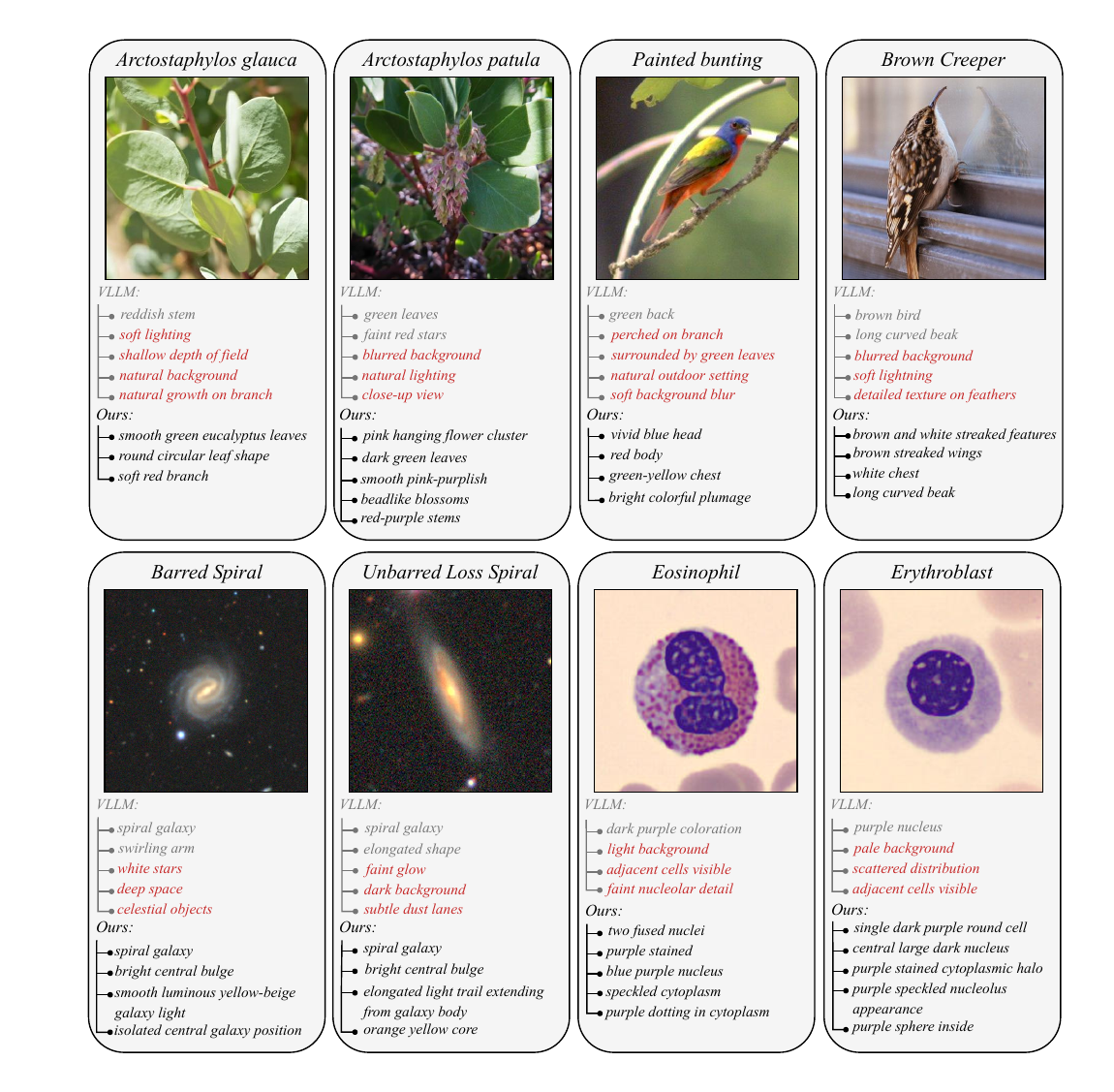
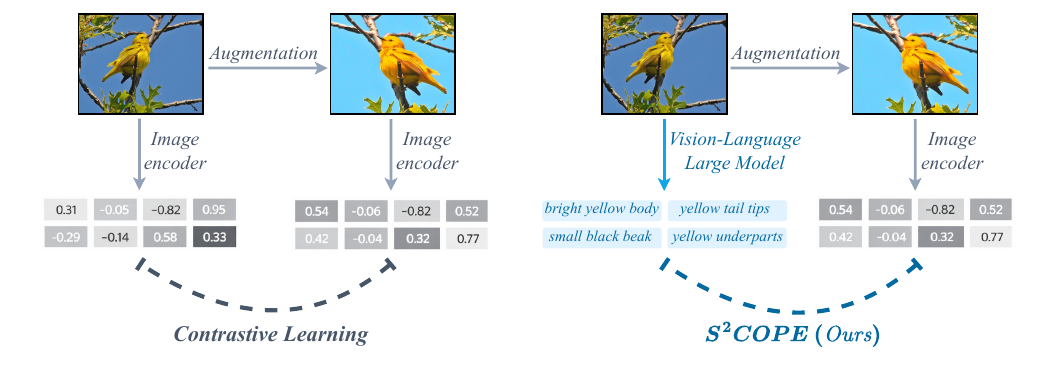
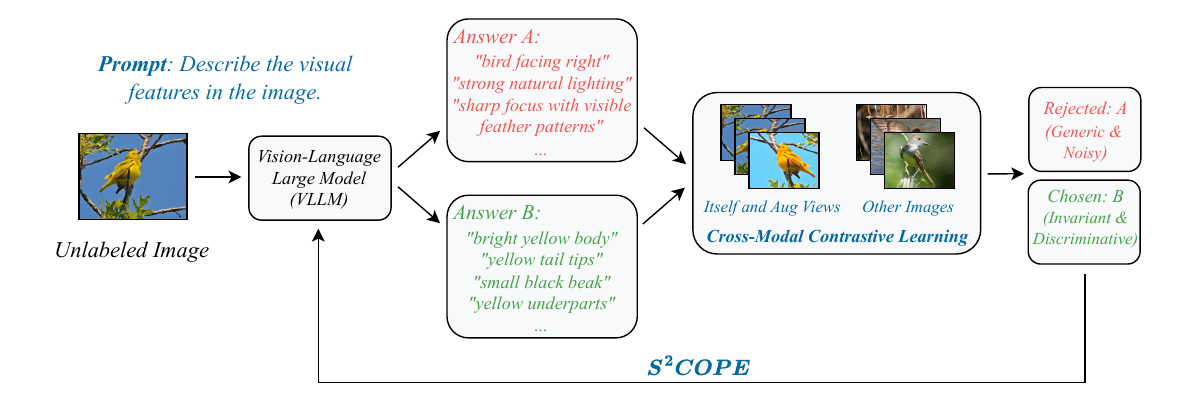
We introduce Self-Supervised Concept discOvery via Preference lEarning (S²COPE), a label-free framework that resolves this dilemma. Instead of treating Vision-Large-Language Models (VLLMs) as static feature extractors, S²COPE leverages them as active participants in a self-supervised preference optimization loop. By autonomously hypothesizing, validating, and reinforcing candidate visual attributes directly from raw imagery, our framework discovers novel, structured concepts without a single label.
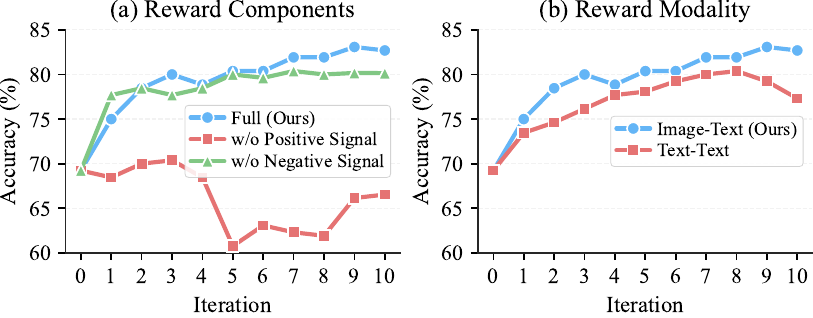
Extensive experiments across natural, medical, and physics domains demonstrate that S²COPE successfully extracts domain-specific concepts where standard VLLMs often fail to generate. By amortizing concept discovery directly into the VLLM backbone through our self-supervised preference objective — rather than relying on static generation and disjoint filtering — we achieve up to a 24-point absolute improvement in downstream top-1 classification accuracy on unseen data.
@article{xiang2026scope,
title={S$^2$COPE: Self-Supervised Concept Discovery via Preference Learning},
author={Xiang, Shilong and Zhang, Zirui and Mao, Chengzhi},
journal={arXiv preprint arXiv:2606.14586},
year={2026}
}